














1月7日10时29分,玉兔二号成功唤醒进入第26月昼工作期。
艰难迈出第一步
每天醒来第一句,让俺看看这块儿地——当前位置西北和西南方向各有一个危险的撞击坑,玉兔的行动路线被封锁在了接近正西的方向,意味着几乎“无路可走”。
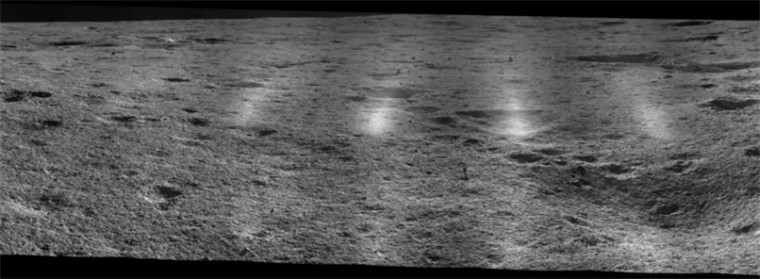
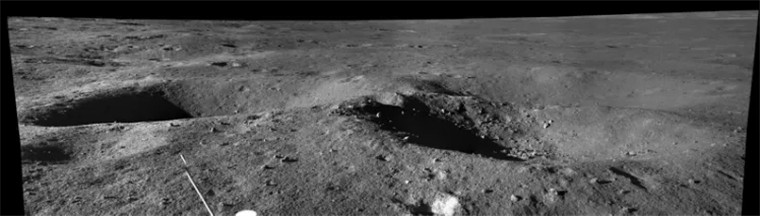
全景图像远处的复杂地形
然而,驾驶员们仔细研究后发现,仅存的西边路也十分艰难,左右两边遍布小型撞击坑,只剩中间“一线天”,初步测量这条路略窄于车体外廓宽度,从这条路走,就会有一边车轮踩进撞击坑。但环顾四周,别无他法,只好险中求稳,由此而行。至于是左边踩坑还是右边呢?驾驶员反复测算考量,评估发现虽然左边坑貌似小,但深不见底,发生车轮卡滞的风险更高,于是权衡再三,决定让左轮避开撞击坑,右轮少量涉及坑中,突出重围。
刚解决了眼下第一步,就面临着西北方向的复杂地形。朝西北望去,多个小型撞击坑头尾相连组成了一道“封锁线”,但因为距离较远,无法对地形进行精准测量,穿越还是绕行,这是个问题。驾驶员们决定重新感知,再作判断。

第一步移动后的车辙回望图
感知图像下传后,在场的所有人却更为纠结,原来认为西边可以绕行的地区大面积过曝,远处地形看不真切,如果绕行,将会面临更多未知。目前只有两条路,一是从四个连续撞击坑的堵截中突围,玉兔需要从一个直径近一米的撞击坑上跨越,虽然没有超标,但也让人捏一把汗。
穿越四个撞击坑的备选路线
另一个就是降低移动风险,仍从西边绕行,迎接未知的前路。究竟选择哪个,驾驶员们各执己见,一度陷入僵局。他们拿出上个月昼的地形和月面高清态势图来再次反复查看分析,终于判断绕行方案的后续路线是大体安全的。于是在长达两小时的推演探讨后,最终驾驶员们决定穿过未知过曝区向西绕行。移动到位后,感知拍照立马安排,结果显示如大家所愿,未来一片坦途!
西侧绕行的备选路线
意外发现“里程碑”
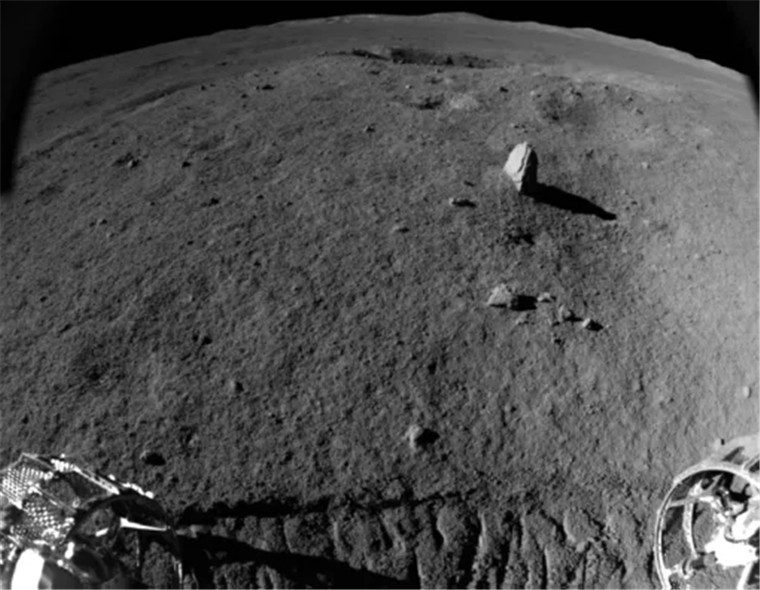
也就是在这次感知的图像中,驾驶员们突然发现了不远处有一个“遗世独立”的石块,犹如高速公路的里程碑一般,似在见证月背亿万年的历史变迁和玉兔两年的奇妙历险。有人提议:“就叫它里程碑吧!”大家意见迅速达成一致。

两步移动后导航相机成像图
驾驶员们立刻把这个有趣的发现告诉了科学家,科学家也对“里程碑”啧啧称奇,双方心领神会,第二天就一致决定——走,看看去!
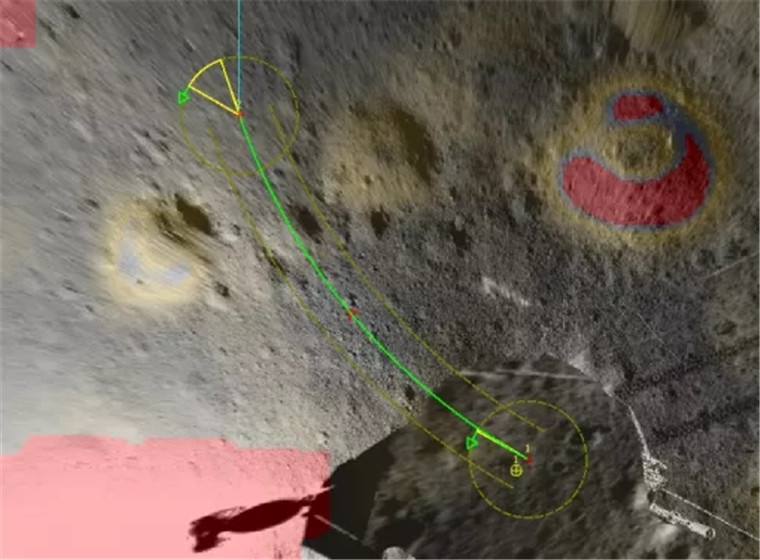
月午期间驾驶员们就开始分析规划,制定探险攻略。出月午后驾驶员们先对准石块和撞击坑拍照成像,从全景环拍的局部图中获取了石块和坑的基础信息。此外,由于“里程碑”位于玉兔当前位置的西北侧,月昼下午太阳方位也在西北侧,如果在当前位置探测直接发起冲锋,科学载荷的探测视场将落入石块的影子中,因此驾驶员们先让玉兔来到石块的西南方向。
小迈一步,来到探测起点
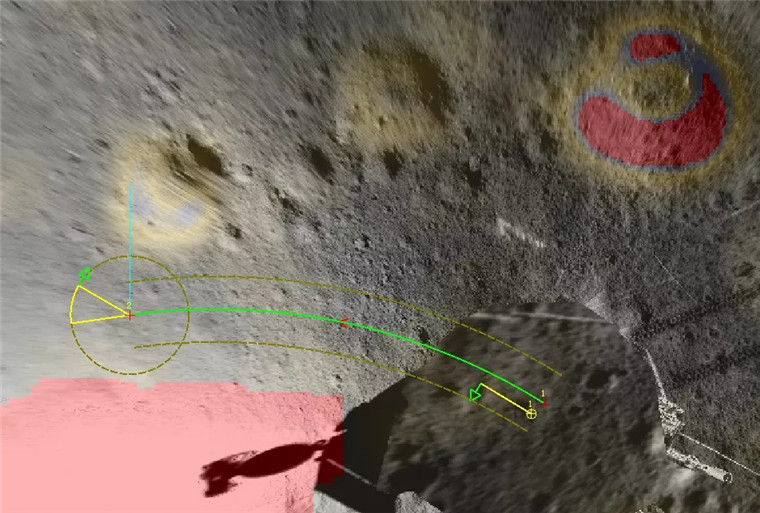
拿到避障相机的图片后,驾驶员们对探测路径的规划陷入深深的纠结中——若想获得更好的探测效果,最好控制玉兔先向左迂回一下再上前探测,改变探测航向可以使红外视场更接近石块向光的高亮那一面。但这样折线行驶受太阳敏感器可见的限制,当天的探测航向要控制在50°以内;若从当前位置直线逼近探测,探测航向约36°,红外视场很可能落到石块侧立面的棱角上,有明有暗,影响探测效果。驾驶员们谨慎模拟了两者的预估红外视场投影后发现,折现行驶相比直线逼近改进并不大,且有车轮卡滞的风险。大家决定第一次探测我们“直接点”。
两种探测方式的预估红外视场投影
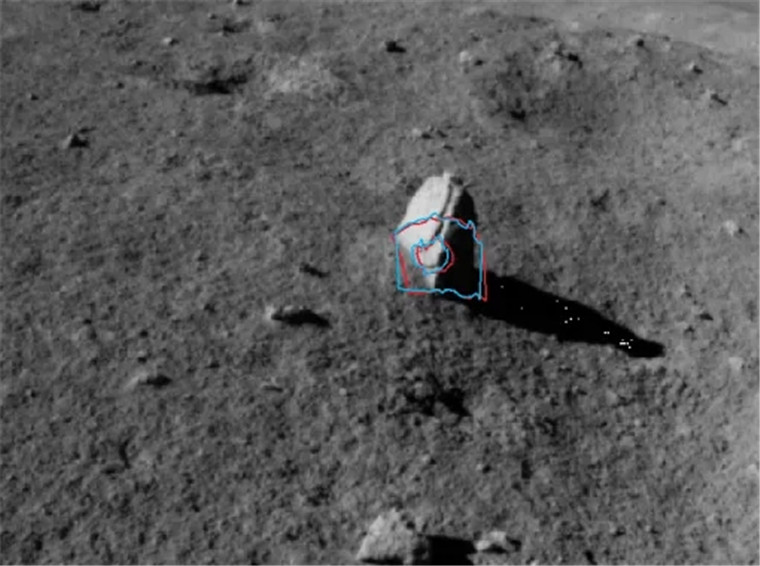
第一次探测的结果显示,实际红外视场(下图红圈)距离理想的视场落点(下图绿圈)刚好差了6厘米左右的距离。不惧挑战的驾驶员们立即重整旗鼓,决定向前挪一点点,再次探测。
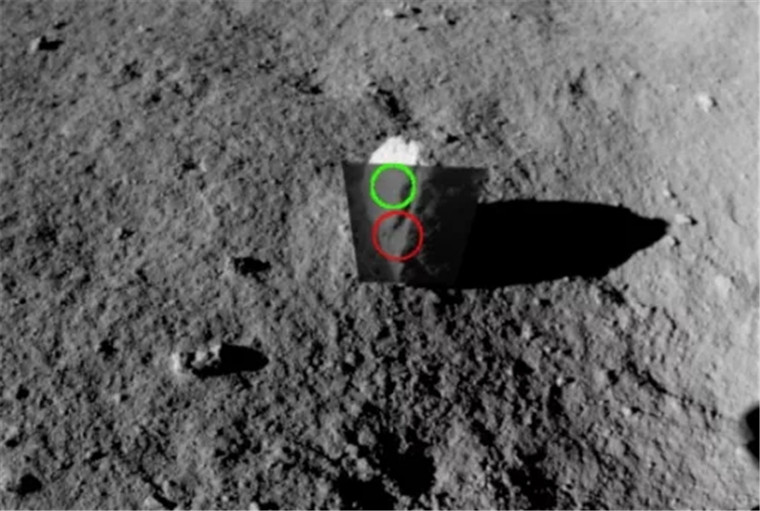
休眠当天,驾驶员们收到了科学家们根据探测结果数据做成的第二次逼近探测的视场投影图,投影结果显示,视场稳稳地落在了石块的高亮面上,一条闪电般的纹理出现在视场中,完美!接下来就期待科学家们的表演了。

“差之毫厘”险“失眠”
探测完毕后驾驶员们将控制玉兔退回到“里程碑”西南的出发点休眠。探测前驾驶员们特意在这个位置将航向调整至休眠航向做了验证,结果表明满足休眠条件,只是滚动角比较接近门限值。但可能由于转向使地形发生变化,这次后退到位后,车轮未回零时驾驶员们发现,滚动角竟然比门限超出了0.05°,根据定位结果显示,玉兔正好卡在了休眠区的“门槛”上。这就很尴尬了!此时已经夜里十点了,疲惫了一天的驾驶员们心又揪了起来。他们控制车体转了2°,发现滚动角仅仅产生了0.02°的改善,还有0.03°的超限。驾驶员们经过规划分析,发现旁边就是一大片休眠区,当前位置处于了休眠区的边缘,于是决定后退至休眠区的中央。车轮回零后,滚动角又有所改善,恰巧落在了休眠姿态的边缘。还要不要后退?驾驶员们讨论起来,休眠姿态的要求是综合考虑唤醒和热控相关要求的,是事关玉兔生死的大事,一丝一毫的差池都不能有。而一会儿玉兔还要实施转向感知,为以防万一,驾驶员们还是决定再继续后退,进入大休眠区。
移动开始后,刚刚的疲惫一扫而空,大家擦亮双眼,全神贯注地监视大屏幕上数值的变化。终于!随着移动到位,滚动角逐步稳定在了一个更加安全的范围,车体也稳稳地停在了可休眠区,玉兔终于可以睡觉了。虽然此时数值仍接近门限,预计会让玉兔下次醒来稍晚一点,但恰好能与“天问一号”任务的重要控制错开,可谓一举两得,让驾驶员们能有更多的精力来同时应对来自月球和火星的挑战。
休眠前玉兔再次环顾了当前位置的壮丽景象,刚刚走过的三连坑,幽深鼎立,紧紧相连,在我们驾驶玉兔走过的两年里第一次遇到,而将要前往的地方,驾驶员们发现有个“石笋”兀然挺立,一场神奇的探险之旅即将上演,这次它又将为我们带来怎样的月背故事呢?
“三足鼎立”的撞击坑

神秘的“石笋”
