














8月20日,由中国航天科技集团有限公司五院总体设计部抓总研制的中国空间站核心舱机械臂,再次托举航天员出舱操作,雄伟有力的“中国臂”再次炫舞太空。
这个让国人自豪的空间站机械臂是怎样诞生的?有着怎样的研制故事?让我们走进总体设计部空间机器人团队,一起揭秘“中国擎天巨臂”。
空间机器人团队是一支学科配置齐全、专业交叉互补、梯队结构合理、兼具工程研制能力与科学研究能力的空间机器人创新团队。近年来,团队承担并完成了嫦娥五号表取采样机械臂、空间站核心舱机械臂、祝融号火星车的技术抓总及核心分系统与产品研制任务,实现了无人条件下月球表层指定区域内多点样品的自主采集与封装、载人航天三期工程空间站大型机械臂在轨应用、首次火星表面移动巡视探测等重大工程目标,为国家重大专项工程建设作出了重大贡献,并取得了显著的社会和经济效益。
一腔热血揽月土,十载青春终不负
探月,很难;采样返回,极难。
尽管所有人都做好了心理准备,月表采样这支队伍会遇到不少磨练,但没有人会想到,从立项到最终发射这一磨就是10年。
2010年正式立项的嫦娥五号任务,亮点之一是表取机械臂子系统。它能够实现月球表面无人自主采样、样品转移和封装。采样时,表取采样机械臂进行智能采样,获取到足够的月壤后,初级封装装置智能完成月壤封装,并通过机械臂抓取、转移至上升器,将月壤带回地球。

▲ 嫦娥五号探测器表取机械臂
10年间,主任设计师带领型号研制团队艰苦攻关,从功能性能需求分析入手,系统论证、指标分解、仿真分析、测试验证,一轮一轮推导反演,一轮一轮迭代优化。表取机械臂子系统实质就是一个智能机器人系统,需要结合机械、力学、控制、视觉、信息等多学科领域,才能获取系统最优的结果。而这,需要创新思路和创新途径,才能解决传统单一学科领域无法解决的一系列问题。
压力空前,重责在肩。月亮是研制期间型号队伍朋友圈经常出现的元素,陪伴整个项目团队的经常是高悬在夜空的月亮。那并不明亮、却足以照亮星空的月光陪伴着大家匆匆的步伐,陪伴着家人略显孤寂的等待,也陪伴着他们追寻科学真理的探索。
十年磨一“臂”。在表取机械臂子系统研制过程中,项目团队先后攻克了月面无人自主采样与样品抓取转移等关键技术。最终,表取机械臂子系统所有功能性能全部满足要求,圆满交付总体;且经对标,系统整体技术指标达到国际先进水平,部分关键指标国际领先。
用32.48公斤的子系统去承担整器(8.2吨)的关键任务之一,不能不说是“勇敢者的游戏”。而圆满的表取采样结果向世人证明了,中国人有能力用自主知识产权完成在另一颗星体表面的无人自主采样操作。2020年12月2日至3日凌晨,在项目团队紧张的注视下,表取机械臂子系统稳稳地将整个采样环节执行得分毫不差、丝丝相扣,圆满完成了表取采样、封装和转移任务,不负祖国和人民的期待。
嫦娥五号带回的这一掬月土,凝聚和寄托了无数中国人的期望与梦想。但为了这份期望和梦想成真,团队足足等了3年多。自2017年验收完成、交付总体,由于长征五号运载火箭的研制进展并不顺利,嫦娥五号只能贮存等待。整个月表采样任务团队陷入了沉寂。
面对现实,团队主动集中研讨,互相鼓励,互相疏导,及时将盼望任务成功的焦急心情转化为保障任务成功的坚定决心。文件复查、模型复查、仿真复查、数据复查,脑海里万千遍模拟的任务演练,操作中不断熟悉的故障预案……整个团队都在用忙碌而扎实的日常工作填满漫长的等待,用仰望月空的宁静舒缓枯燥繁多的发射前准备。
终于,2020年,长征五号遥五火箭整装待发。两天工作任务,月面多点采样、样品转移等一连串动作按预定方案有条不紊地执行,团队成员的心也愈发激动。
自动采样是子系统乃至嫦娥五号任务的核心关键环节之一,在超过100摄氏度的月面高温环境下,子系统克服了测控、光照、电源等方面的条件约束,依托精心研制的表采机械臂及末端采样机构,完美实现了多点、自动化采样。直到月球样品圆满完成封装,整个项目团队才真正放下心来,大家欢呼雀跃地相互拥抱祝贺。
蝴蝶翩跹起舞,遨游红色星球
2014年10月,五院启动了火星探测器研制工作,计划一次实现对火星“绕、落、巡”的探测任务。其中,火星车成为耀眼的明星。当时,人类成功在火星行驶的巡视器只有美国4辆火星车,但却在轨相继发生了车轮破损、车轮沉陷脱困困难、松软坡道爬坡困难、车体托底等问题,火星表面恶劣的地形也给产品设计带来了极大的难度。
火星车在研制之初就面临着诸多困难。首先要解决美国火星车在轨发生的所有问题,尤其是车轮沉陷、沙地爬坡困难、车轮破损这3个重大在轨问题,它们是造成火星车无法继续行驶的致命故障。
其次,这是世界上首次采用主动悬架的星球车,基于摇臂结构的主动悬架移动机构,在世界上都没有成功应用的先例,主动悬架将带来多少问题、造成什么困难都需要不断探索和研究。
最后,火星车重量要求极为苛刻,相比于美国火星车,我们的机构数量明显增多,但是移动系统与整车重量占比却优于美国火星车。
为了验证我国火星车是否能够应对美国火星车在轨遇到的各类问题,团队开展了大量极为苛刻的地面研制试验。
在车轮沉陷方面,美国火星车沉陷脱困往往都需要花费十几天甚至几个月,2轮沉陷就会造成永远无法脱困。项目团队试验了将6个车轮全部埋入土壤、车体完全着地的极端恶劣工况,并且找到了解决办法,火星车利用主动悬架十几分钟就能顺利脱困驶离。在爬坡能力验证中,团队设计了6种智能爬坡方案,松软坡道爬坡能力从国外的15度提高到27度。在应对车轮破损方面,国际上首次采用高强度、轻量化、高硬度的某型材料,一体化加工成型,轮胎表面单点承载能力超过1000牛,轮齿单点承载能力也超过1000牛,相对于给1个车轮底部或轮齿上放个钉子,就能举起整个火星车。
▲ 火星车团队
研制团队创造性地提出了摇臂主动悬架的设计概念,同时又采用了6轮转向,火星车一下子变得灵活了很多,能够实现很多以往星球车不具备的功能:可以实现车体升降,再也不怕托底;可以实现蠕动前进,解决车轮沉陷、松软坡道爬坡困难的难题;具备六轮转向“蟹行”功能,应对复杂地形更加从容;车轮故障,可抬轮行驶,移动能力基本不变。
新的技术也带来了很多新的问题,包括车体升降如何保持水平、颠簸路面悬架如何牢牢锁定、抬轮过程车轮负载成倍增加等各类问题。设计团队通过精准的仿真分析、全面深入地试验验证,确保每一个问题都得到完美解决,产品设计万无一失。
团队在研制过程中,精益求精,追求卓越,虽然应用了大量创新和减重设计措施,但是对高可靠性的要求没有放松,从设计到地面验证更是严上加严。大家常说,“在轨需要1分力,产品设计保证10分力,摸底试验验证达到20分力。”以火星车移动驱动能力为例,在真空高低温下测试,火星车只需要付出20%的功力,牵引力就能达到自身重量的3倍,远远满足设计要求。
炫舞璀璨太空,擎起中国脊梁
空间站核心舱机械臂是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。其中,核心舱机械臂展开长度为10.2米,最多能承载25吨的重量,是空间站型号任务中融合了机、电、热、控制、光学等多个专业的“大力士”。
空间站核心舱机械臂是一款模仿人类手臂的七自由度机械臂。核心舱机械臂的肩部设置了3个关节、肘部1个关节、腕部3个关节,一共7个关节。每一个关节对应一个自由度,就如同人的手臂一般,具有七自由度的活动能力。通过各个关节的旋转,机械臂能够实现自身前后左右任意角度与位置的抓取和操作,真实地模拟人类手臂的灵活运动,为航天员顺利开展出舱任务提供了强有力的保证。

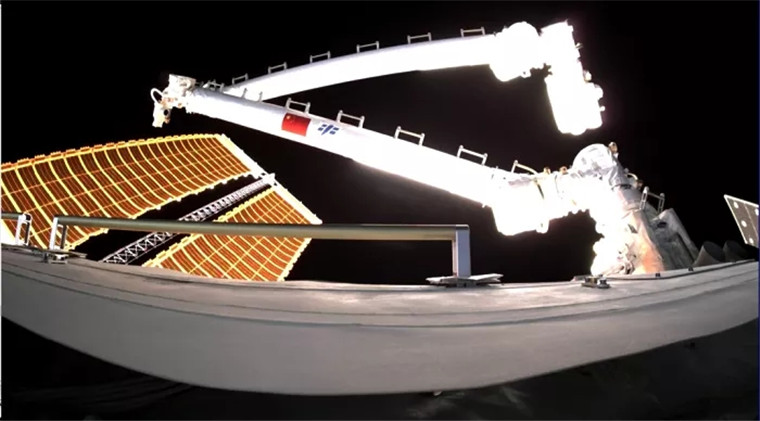
▲ 空间站机械臂展开构型
空间站核心舱机械臂还是我国首个能长期在太空轨道运行的机械臂。作为我国首个实现工程研制的大型空间机械臂产品,机械臂还具备“爬行”功能。“肩3+肘1+腕3”的关节配置方案中,肩部和腕部关节配置相同,意味着机械臂两端活动功能相同。同时肩部与腕部各安装了一个末端执行器,作为机器臂的“触手”,末端执行器可以对接舱体表面安装的目标适配器,机械臂通过它们的对接与分离,同时配合各关节的联合运动,就能实现在舱体上的爬行转移。
空间站核心舱机械臂是空间站组装、建造以及航天员舱外操作的重要装备。从2006年开始,五院总体设计部就召集精锐专家、骨干力量组成空间站机械臂的技术攻关工作团队,先后花费6年时间开展近百余项工程摸底与关键技术验证工作,并在2015年、2017年顺利完成力学试验以及EMC试验,最终于2021年4月随着天和核心舱一起进入太空预定轨道。
航天事业起步之初,面对国际严密封锁的局面,钱学森带领中国科技专家打开了中国导弹、火箭的发展创新之路。“外国人能搞的,难道我们中国人不能搞?”时隔多年,钱老的铿锵话语犹在耳畔,研制团队践行自立自强的精神,全面跨越国际技术封锁,在国内首次提出并实现了可爬行、可维护的大型七自由度全对称构型空间机械臂系统方案。
心中有信仰,脚下有力量。空间站核心舱机械臂每一项工作的顺利开展、推进,以及在轨稳定运行的亮眼表现,都离不开五院总体设计部研制团队的心血和努力。

▲ 空间站机械臂团队
中国空间站核心舱机械臂的研制攻关历程,是中国航天科技发展的求索创新之路的一个缩影。自主创新是我们攀登世界科技高峰的必由之路。团队也深刻地认识到,关键核心技术是要不来、买不来、讨不来的,唯有满怀“亦余心之所善兮,虽九死其犹未悔”的奋斗豪情,唯有坚持“甘于坐冷板凳,勇于做栽树人、挖井人”的战斗定力,才能花费十余年的时间真正推动空间站机械臂各项指标达到世界领先水平。
在团队夜以继日的努力下,机械臂全部核心部件实现国产化,具有从无到有的里程碑意义,并形成多项空间机器人行业标准,获得多项国家授权专利,出版多本专著,在空间智能装备的中国制造之路上披荆斩棘、破浪前行。
面向空间机器人领域技术与应用发展需求,团队构建了系统总体与核心专业协调配套的业务体系,形成了集任务设计、系统设计、系统验证、系统管理于一体的研制体系;建立并发展了以特色核心技术为主体的空间机器人技术系统;配置了覆盖空间机器人研制全周期、全流程、全要素且综合验证能力最优的配套基础设施,完备性和先进性处于国内一流水平。

▲ 空间机器人团队
空间机器人是支撑航天事业未来发展的关键技术领域,面向后续任务,总体设计部空间机器人团队主动思考、积极谋划,以习近平新时代中国特色社会主义思想和习近平总书记关于航天强国建设的重要指示为指导,牢记“发展航天事业,建设航天强国”的历史使命,大力弘扬航天精神,在空间机器人这一多学科交叉的战略性高技术领域,不断推动新技术进步与新产品研发,努力提升我国空间机器人技术整体水平。
空间机器人团队将前赴后继,奋勇前行,共同展望中华民族伟大复兴的光明前景,共同奔赴航天强国建设的伟大征程!
